| ����PID����������Ԫ�ض������䪚�صĂ��ԣ�ͬ�rҲ�ܺܺõĺ���������������ܺܺõ����������g������ã���ô������p�ɵ��{��(ji��)������·������ �����ܱ������e�֣��֣�PID�������������^�̿����I��ʹ����V���Ŀ�������������������߀����һ���ľ���������ͨ���˂����y��PID��·��������Ѡ�B(t��i)������y������׃��Ҏ(gu��)�ɣ����Ҳ����]�h(hu��n)��·�{ԇʧ���İY�Y������������䌍������ܴ�һ���ֵ�ԭ�����������PID����(sh��)��e̫��������]���γɺ��m�����������M����ˣ�����댍�F(xi��n)��ѿ��Ơ�B(t��i)����@��������(sh��)�ąf(xi��)���Dz��ɻ�ȱ�ġ�
����ֵ�Ñc�ҵ�����������^60��Č��`���������҂��ѽ��������S��PID��������������̎��ͼ��g�ˆT�ѽ��˽��ˡ������������e�֡��������֡��Ą��������Լ���������Ӱ���������ɴ���������������Ԍ�һЩ���y�Ŀ�����r�M������{��(ji��)����������_����K��Ч��������
��������Ŀ������Ǽ������Ŀ������������˂���ʹ�ú�ܿ�l(f��)�F(xi��n)��һ���ش��ȱ������������������{��(ji��)�^��׃�����O��ֵ��ƫ��r���^ͻȻ�������F(xi��n)���D��ʾ�ķ�(w��n)�B(t��i)ƫ�ƣ�Steady-state offset������������������H�m�����{��(ji��)�^С�������ƫ�����������ƌ�����^��׃���ܽӽ��O��ֵ������������_����������@���ɼ������������Ĺ�����ʽ�Q���������ͨ�^ݔ���Pֵ����ƫ��ֵ��Ӌ����ƙC�����{��(ji��)Ч������ݔ��һ���^���Pֵ��������ƙC���͕�һ�®a���^����{���������Ķ�ʹ�^��׃����ֵѸ�ٽӽ��O��ֵ��������ͬ�r�������g��ƫ��ֵ׃С�������ʹ�ÿ��ƙC�����{��׃��׃С������K�ͳ��F(xi��n)�˟o�����Mһ���{��(ji��)����r�����ˣ��������܌�ƫ����ȫ�������{��(ji��)Ч��������

��������e�����õĿ���
���������߂��l(f��)�F(xi��n)��ͨ�^�ք��������ƙC�����{��(ji��)Ч��������ʹ�^��׃�������܉��_���O���c�����ܿ˷��������Ƶ�˥׃Ч������@�N��ʽ���Q�����ã�resetting����·��
�������˱�������ˆT�����^�ɔ_��������Ԅ����ü��g��Automatic reset�������댍ʩ�@헹���������������ԄӸ���(j��)��һ���������е�ƫ�����e�����γ�һ���ı���ϵ��(sh��)����������(j��)�@һ�����ӏ����ƙC�����{��(ji��)Ч���������ʹ����ƫ�����ֵ�r���m(x��)��������ƫ���ֵؓ�r���m(x��)�½�����@�N�Ԅ����ü��g���ǬF(xi��n)�����Q�ķe�ֿ��ƣ����Q����e�ֿ���Ч����ݔ�녢��(sh��)�������Q�����������
��������������ζ��ֻҪ�^��׃��δ�_���O���c���������͕����m(x��)�a���^�����{��(ji��)Ч����������@�������c�������Ʋ�ͬ�����������ֻҪƫ���������e�ֿ��Ƶ��{��(ji��)�Ͳ���ֹͣ���������������f������������˷�(w��n)�B(t��i)�`����������ô�e�ֿ��ƾ͕�����Ŭ����ȥ�����@��ƫ���������������������ƫ��ͷ�(w��n)�B(t��i)�`���ȫ��������e�ֿ��ƕ���֪ƣ��س��m(x��)������ȥ�ġ�
����Ȼ������e�ֿ���Ҳ�������Լ��Ć��}����������^��׃�����@�t�����������ô���������ʹ�ü��ҵķe�ֿ����ֶ������Ҳ��Ҫ�ஔ?sh��)ĕr�g������ƫ�����������������O��̫������������������{��(ji��)���^����������������^�{��ͬ�r���ڷ����γɸ����ƫ����������෴�����������ȥ����^��׃��ֵ����ʎ�����m(x��)������ֱ�����ƙC�����{��(ji��)�O���_ʼ��0%��100%�gѭ�h(hu��n)���
�����@�N�B�iЧ����Ҳ�Q���]�h(hu��n)��·�IJ���(w��n)�����������ܰl(f��)���ڌ��{��(ji��)Ч���������еĿ����^�̻������������e�ք��������箔Һ�w�ڹ��зe�۵��^�̣��Ŀ����^���С�PID��������PI�{��(ji��)Ҳ���ܕ��ӄ��@һ��r�������@ȡ�Q�ڿ����^�̱����ı��F(xi��n)��
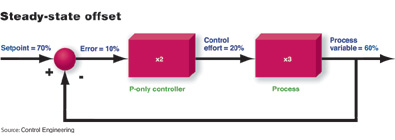
���@�����εĵ��Ϳ��ƻ�·������һ����������(sh��)��2�ı����������{��(ji��)��һ����(w��n)�B(t��i)���Mϵ��(sh��)��3�Ŀ����^�����
�@�����f����������ƫ�����2������ƙC�����{��(ji��)�������ͬ�r����@���{��(ji��)��������3���a���^��׃��ֵ�����S��һЩ�̕�����ӣ����������O���c��70%�������ô����^�����������K�^��׃����ֹͣ��60%���mȻ�@�rƫ����δ�����������������������������κ��Mһ�����{���� �������{�
�����e�ֿ����m���ڿ��ƻ�·���{��(ji��)�C�����Ȳ����ԝM������ľ��{��(ji��)������r�����������������t�o���ṩ���ğ�������y�T�^С�o���a�����������������ѽ��_���O�ޟo���Mһ�������ı��������oՓ�����ݔ��߀����Сݔ�����@�N�����ȿ�����ijһ��ֵ�_���O��������
�������@���O��ʹ���^��׃���o���^�m(x��)���ߕr�����������ԕ��^�m(x��)Ӌ���O���c�c׃���g��ƫ�������۷e���^ȥƫ������ڲ������������e�ֿ��Ƅ������_ʼ���m(x��)�����ӿ��ƙC�����{��(ji��)�����������Ȼ����������{��(ji��)�C���ѽ��_����ߘO��ݔ���������^��׃��ֵ�ѽ��o�������O���c����һ������
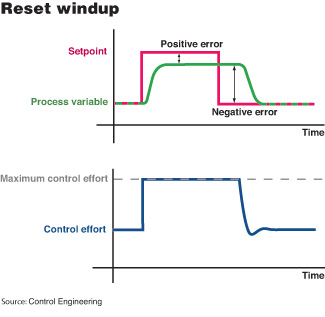
���������{��(ji��)�C���ѽ�̎��ȫؓ���\����B(t��i)�������{ͣ�reset windup���o���������r�Ŀ���Ч�������������������������T�@�r��ͨ�^�����O���c���{��(ji��)�C�����Ʒ����ȵķ�����ϵ�y(t��ng)�֏��������������Dz������κη��������
����������@�Εr�g�ȣ��{��(ji��)�C����ݔ�������_��100%������ɴ��۷e�����ľ�ķe��ƫ���������@�N�F(xi��n)��Įa���������oՓ��ǰƫ���Ƕ���������@��ֵ�����ֺ��Lһ�Εr�g��ͬ�r�������e�ֿ��Ƅ������������S���ڸ�ݔ����B(t��i)���{��(ji��)�C������ʼ�K�����ֵ����
������Ȼ�������������ݔ���ڲ����T���O���c�ĵ���һ���̶ȕr����u�_ʼ�֏����������e��ƫ���Ҳ���_ʼ�½��������ǣ��@ôһ�L������ƫ���۷e�����߀����Ҫ�ஔ��(sh��)���͕r�g��ؓƫ��������������֮ǰ����e�ֿ��Ƅ����Ԍ�����ȫؓ��ݔ���Ġ�B(t��i)�����D��ʾ����
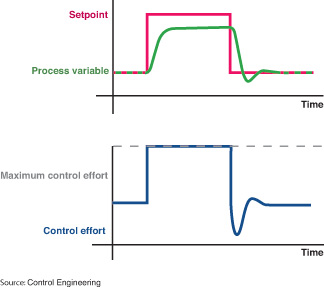
�����˂��ѽ��OӋ����һЩ������F(xi��n)���{ͬF(xi��n)��ķ��������������(sh��)�ķ����x�����{��(ji��)�C���_��͕r�P�]�e�ֿ���������ͬ�r���Ҳͨ�����M��һЩ�~����{�����Ա�����������¼���r�o���Mһ���������{��(ji��)�C�����
���@�������У������T�Lԇ���O��ֵ��ߵ��{��(ji��)�C���������ϵ�λ���������^�쵽�������o�����^��׃����ߵ��@һ�߶Ⱥ���������T���O��ֵ�֏͵�һ���^�͵�λ�á��@�r������{��(ji��)Ч�����]���S���O��ֵ���Ͷ�ͬ�������������������ǰ��Ŭ������������������a���˷e���^���ĬF(xi��n)���������mȻƫ���ѽ�׃��ֵؓ������{��(ji��)�C����Ȼ���������������������������۷e��ؓƫ������^�O��ֵ׃��ǰ�۷e����ƫ���֮ǰ�����ʴ_���f������ؓƫ��ķe���_����ƫ��ķe������֮ǰ��������{��(ji��)�C���Dz������κη�������ġ� ����������
����PID���������ֿ���Ҳͬ�������б�������ֿ��Ƅ�������ƫ��ֵ��׃���ʰ��������Ϳ�����ݔ�����{��(ji��)����������@���Ա����^��׃���^���_���O��ֵ���Ķ����F(xi��n)ƽ��(w��n)���{��(ji��)�������ͬ�rҲ�����˳��{����ӵij��F(xi��n)���ܡ�
�����������������ֿ��Ƶ��^������������ ���x܇��
Ч��̫�^���@����Ҳ����ֱ�������ӡ�����Щ�܌��r��ӳ��������ݔ��Ч���Ŀ����^���У�����늙C��Cе���������@�N�F(xi��n)����F(xi��n)�÷dz����@��
������ƫ��ֵ�S���O��ֵ�ĸ�׃���l(f��)��ͻȻ׃���r�����ֿ��Ƅ���������Ч����ֹ��̼�������ݔ��������׃���������@�r����������Ą����H���ֿ��ƛQ���������ܱ������߷e�ֿ��Ƶ�Ӌ��Y����Ӱ���������μ���PI��������������PID�������܉����Ч���AҊ�O��ֵ��׃��ƽ���B(t��i)�¿����_������Kݔ�����@�����ֿ��Ƅ�����ǰһֱ���Q�����A������pre-act������ԭ������
�����@�ӵ��AҊ����ͨ����r����������������������������O��ֵ׃���r��������ݔ���Ĵ̼������Еr������ǂ��韩���������^��׃����Ҫ�������������(w��n)����׃������r�����������҃Ȝضȿ��Ƶ�����ÿ�εĜض��{��(ji��)�����һ�ɏ��ŵğ��L������@���H�H�����g����ˁ��f�ǷN�尾������ӟ�t���f�����ڼ��g�ϟo�����F(xi��n)���������
�������@�N��r�����ͨ����ȡ���ֿ��Ƶ������������ߌ��^��׃����ؓ��(sh��)����������ֱ�ӌ�ƫ��ֵ������������Ӌ��Ļ���(sh��)����������O��ֵ��׃��������ô�@���Pȡ��헔�(sh��)�������ֻ���(sh��)�ĽY����һ�µġ�����O��ֵ�����Aʽ��Ҏ(gu��)�ɵذl(f��)����׃�@�ɂ��Y����Ȼ����һ��������������ÿ�A��׃���l(f��)��һ˲�g�Ġ�B(t��i)����Щ��ͬ��ȡƫ��ֵ�ֵĄ�������Ɍ�������ݔ����˲�r�̼����������ȡ�^��׃��ֵؓ�ֵĄ����t�������
��������Щ���ڔ�(sh��)��(j��)�ɼ��_�ӵ�ϵ�y(t��ng)���f���ֿ���Ҳ��һ���Ć��}���������օ���(sh��)�O���^�������ÿ�εĔ_�Ӷ����������J���^��׃���l(f��)���˸�׃��Ȼ��a��һ�Ώ��ҵ��ֿ��Ƅ�������ʹ�^��׃�����H�������_�����O��ֵ������Ȼ�����������Ӌ��l(f��)��ǰ�^�V���@Щ�_�Ӳ��Ǽ����y���������
�@������������T���O��ֵ�M������ȫ��ͬ�IJ���������ͬ������������@��ʹ�õ��ǎ������{ͱ��o��PID���������
���{��(ji��)�C���_������{��(ji��)���ȕr�����o����ֹͣ�˷e�ֿ��Ƅ���������@�r�������mȻ�^��׃����Ȼ�_�����O��ֵ����������@һ�^���У��������F(xi��n)���{ͬF(xi��n)������������������O��ֵ�֏����~��������������������������푑����_ʼ�{��(ji��)���� ����ȫ������
����ֵ�ø��d��������������@Щ���}���ѽ��ڬF(xi��n)��PID�������еõ������ƵĽ�Q�����{ͱ��o������Ӌ���^��׃���ֺ͔_���^�V���ѽ��ɞ��˴����(sh��)����PID�������Ę˜����á��@�����˿������γɃȲ��Ľy(t��ng)һ�����������̶ȵؑ���ÿһԪ�ص�����Ч�á�
������·�{ԇ(Loop tuning)��һ�T�x����m��P�����I������D����(sh��)�Ԍ��F(xi��n)���O��ֵ׃�����١���(w��n)����푑���ˇ�g��������PID��������ʹ�Á��f���@�������(zh��n)�ԵĹ�����������ϲ����������˂��ѽ��_�l(f��)���o��(sh��)��·�{ԇ���g��ܛ���������̎���@Щ���s�¡������Ȼ�������˹��M���{ԇ��Ȼ��һ�����(zh��n)����Ҳ�ѽ�Խ��Խ������������� |

